|
1. Introduction
Single-antenna GPS provides position and velocity measurements, from which pseudo-attitudes can be synthesized for a fixed wing aircraft. This suggests the potential of single-antenna GPS receiver as the sole sensor of the aircraft. Based on the previous works (Fig.1,2), we developed the flight control system for a small endurance UAV only using a low cost single-antenna GPS receiver that provides navigation solution at 4 Hz.
Figure 1. UAV of GNSS Lab.
2. Flight Control System Design
2.1 Aircraft Feature
The small endurance UAV (Fig.3) developedby KARI is the traditional tailless aircraft with horizontal control surfaceson its main wing surface. It has rudders at the wing tips for verticalstabilization.
2.2 Controller Design
We selected the linear quadratic regulator (LQR)control law based on full states feedback. For longitudinal control, altitudeand airspeed hold controller was designed. For lateral control, bank hold,heading hold, line and circle following controllers were designed. Integral-errorfeedback was added by applying LQR control laws to the dynamic system augmentedwith integral-error state, to remove the steady state error due to externaldisturbance and inaccurate model information.
3. Flight Test
The U-blox 4 module GPS receiver was usedas the main sensor. Flight modes consist of manual, stick auto, hold mode,waypoint navigation, pre-program and emergency modes such as return home. Eachcontroller of hold mode was tested. As a result, the error of airspeed andaltitude converged within 1 m/s and 1 m in the steady state (Fig.7, 8). Due tothe limitation of linear controller, the error of bank hold controllerincreased in proportion to bank command (Fig.11). Heading hold controllerconverged within 2 degree (Fig.12). In the waypoint navigation mode, circlefollowing and path following controller was tested. The cross track error waskept within 10 m (Fig.9, 10, 13, 14).
4. UAV's future and Works in SNU GNSS Lab.
GPS keeps being modernized and other satellite navigation systems such as GALILEO and GLONASS are under development. Accuracy, integrity, availability and continuity of satellite navigation systems will be more improved. Thus the role of developed system will be able to be expanded further as a main control system of a low-cost UAV.
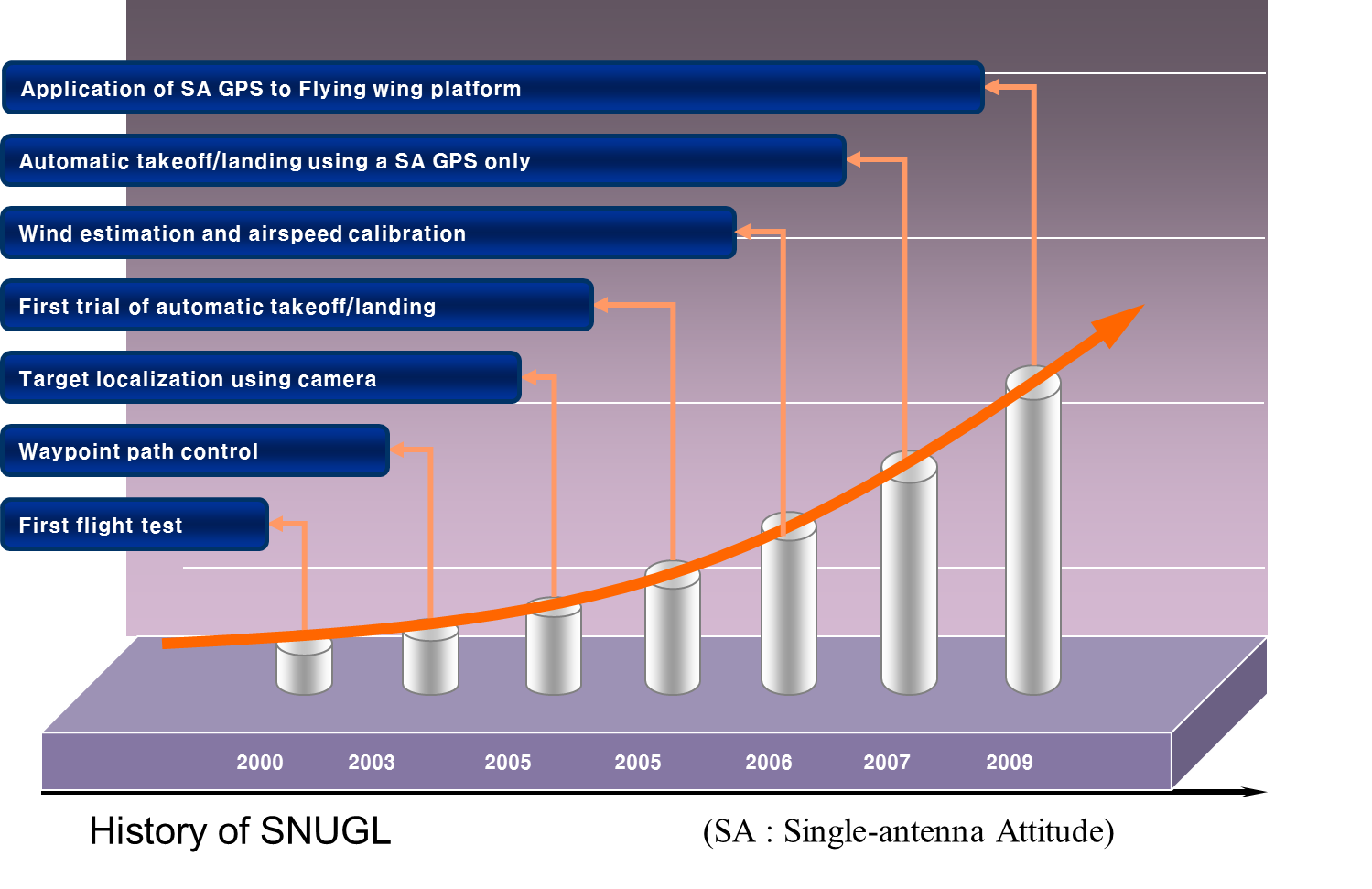
Seoul National University GNSS Lab (SNUGL) developed an automatic flight control system of UAV based on a single-antenna GPS. In 2003, SNUGL succeeded in waypoint path following control. In 2007, we successfully demonstrated fully automatic control of the UAV from takeoff to landing only using single antenna GPS. After that we applied single-antenna GPS based automatic flight control system to flying wing platform, small endurance UAV of KARI (Korea Aerospace Research Institute). In 2009 winter, automatic flight of small endurance UAV of KARI using single antenna GPS only was successfully demonstrated.
 IEEE AES Magazine 2009.05
Inside GNSS Magazine 2010.04
|